



对freertos任务创建函数的理解

xTaskCreate() 函数源码分析笔记
xTaskCreate()实现
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, const char * const pcName, const configSTACK_DEPTH_TYPE usStackDepth, void * const pvParameters, UBaseType_t uxPriority, TaskHandle_t * const pxCreatedTask )这个函数主要做了两件事:分配任务所需的内存,以及初始化任务并插入就绪列表。整个过程通过关中断保证原子性
主要通过一下几个步骤实现
第一步:分配内存
1. 分配栈内存
pxStack = pvPortMalloc( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) );sizeof( StackType_t )根据架构会有不同
32位的话,你填入的栈乘上4就是栈占据的字节数
2. 分配TCB内存
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) );任务栈成功分配的话就接着分配TCB块的内存
3. 将栈的地址保存在TCB里
pxNewTCB->pxStack = pxStack;栈和TCB都分配成功的话就将任务栈的地址存到TCB块中
4. 标记分配类型
pxNewTCB->ucStaticallyAllocated = tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB;FreeRTOS 支持静态和动态两种分配方式,这个字段用于在删除任务时正确释放资源
| 宏定义 | 数值 | 含义 |
|---|---|---|
tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB | 0 | 栈和TCB都是动态分配的 |
tskSTATICALLY_ALLOCATED_STACK_ONLY | 1 | 栈是静态的,TCB是动态的 |
tskSTATICALLY_ALLOCATED_STACK_AND_TCB | 2 | 栈和TCB都是静态分配的 |
第二步:初始化和插入就绪列表
prvInitialiseNewTask( pxTaskCode, pcName, ( uint32_t ) usStackDepth, pvParameters, uxPriority, pxCreatedTask, pxNewTCB, NULL );prvAddNewTaskToReadyList( pxNewTCB );prvInitialiseNewTask初始化任务,填写TCB参数 prvAddNewTaskToReadyList将任务插入就绪列表
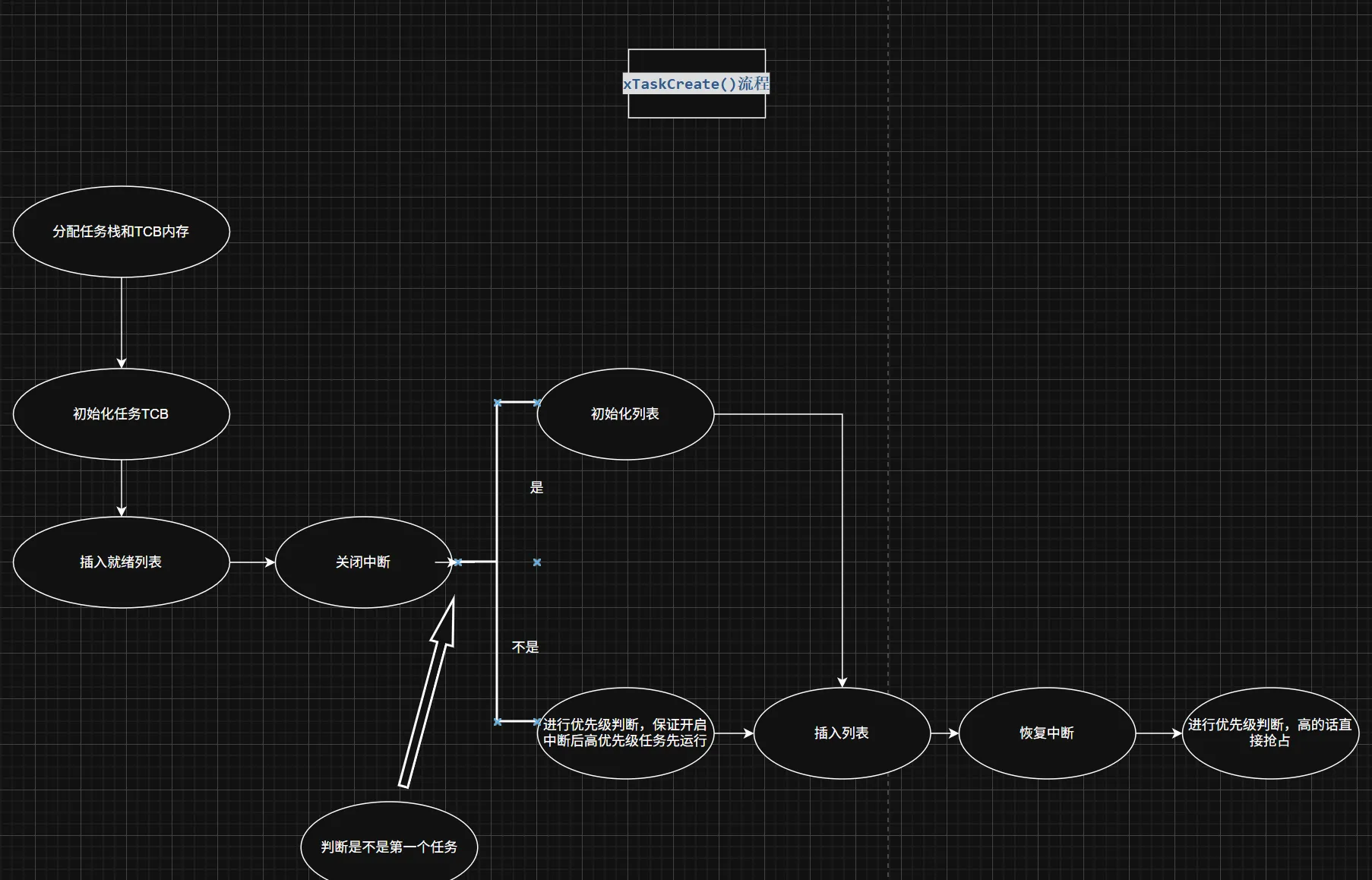
到到这里就是 xTaskCreate 的核心代码流程,可以看到这层封装主要完成了栈和 TCB 的内存分配,然后调用 prvInitialiseNewTask 初始化任务上下文,最后通过 prvAddNewTaskToReadyList 将任务插入就绪列表。而这个插入过程正是任务得以被调度器管理的关键一步,下面我们就深入剖析这个函数的实现细节
prvAddNewTaskToReadyList分析
static void prvAddNewTaskToReadyList( TCB_t *pxNewTCB )
参数是需要插入的TCB块的地址
第一步:关闭中断
taskENTER_CRITICAL();这里可以暂时理解为关闭所有受freertos管理的中断(其实时根据配置屏蔽相应的中断,不一定是所有的),这里关闭的原因和延时函数关闭调度器的原因一样,防止列表操作过程中被打断导致列表不可用,只不过这里关闭了所有的中断,延时函数那里只关闭了调度器 (这里有一个问题,为什么新建任务时需要关闭中断,而延时只需要关闭调度器呢,不都是在操纵全局的链表吗)
第二步:增加任务计数
uxCurrentNumberOfTasks++;增加当前的任务数,一个全局计数器
第三步:判断是否是第一个任务
if( pxCurrentTCB == NULL ){ pxCurrentTCB = pxNewTCB; if( uxCurrentNumberOfTasks == ( UBaseType_t ) 1 ) { prvInitialiseTaskLists(); }}如果pxCurrentTCB没有指向任何一个任务,就是当前没有任务运行,就会将当前任务指针pxCurrentTCB指向新创建的任务,如果这个新创建的任务是第一个任务,会调用 prvInitialiseTaskLists(); 初始化列表
第四步:调度器未启动时的优先级比较
if( xSchedulerRunning == pdFALSE ){ if( pxCurrentTCB->uxPriority <= pxNewTCB->uxPriority ) { pxCurrentTCB = pxNewTCB; }}如果当前有任务,会先进行 if( xSchedulerRunning == pdFALSE ) 判断调度器有没有启动,只有在不启动的时候,才会进行优先级比较来确定打开中断时运行的任务
这一步根据任务优先级,如果建立的任务优先级高于当前任务的,就将pxCurrentTCB指向新建任务,然后调度器恢复的时候运行(注意,只有在调度器关闭的时候才会这样)
第五步:分配任务编号
uxTaskNumber++;pxNewTCB->uxTaskNumber = uxTaskNumber;任务编号+1加到给当前TCB块,这个就和创建进程,PID+1一样
第六步:三层处理
traceTASK_CREATE( pxNewTCB );
prvAddTaskToReadyList( pxNewTCB );
portSETUP_TCB( pxNewTCB );traceTASK_CREATE 是方便你加入自定义逻辑的东西
prvAddTaskToReadyList 将任务放入就绪列表
portSETUP_TCB 一个适配性的保障,在特殊架构上有用
第七步:恢复中断
taskEXIT_CRITICAL();第八步:抢占判断
if( xSchedulerRunning != pdFALSE ){ if( pxCurrentTCB->uxPriority < pxNewTCB->uxPriority ) { taskYIELD_IF_USING_PREEMPTION(); }}判断调度器开没开启,如果开启的话,判断任务优先级,创建的任务如果优先级高于当前任务,直接抢占
总结
可以看到xTaskCreate实现任务内存分配,prvAddNewTaskToReadyList是为了保护,防止插入的时候被打断,主要的插入实现是靠内部的 prvAddTaskToReadyList( pxNewTCB ); 这个宏定义来实现的。从创建到插入列表进行了两层封装,一层初始,一层保护
文章分享
如果这篇文章对你有帮助,欢迎分享给更多人!